The Packaging and Systems Engineering (PASF) Facility currently provides the following design services to its users
- Hardware Design and Development:- The hardware design and development comprises of Analog, Digital and Power Supply designs with various complexities based on the user requirements.
Altium PCB Schematics and Layout tool is used and design involves 2 to 12 layer boards. The design is based on requirements of the user and specific to each type of use case. Gerber for PCB Fabrication is released after Design and development is completed with verification.
Typical use cases are Sensor Interface Analog Circuits, Data Accquistion System using 16 bit MCU’S with Power supply to the circuits as required.
Schematics Development for Analog, Power and Digital Circuits with component count from as low as 50 to 3000.
A typical schematic
A typical layout
For more details on the developed Prototypes please scroll down to:-
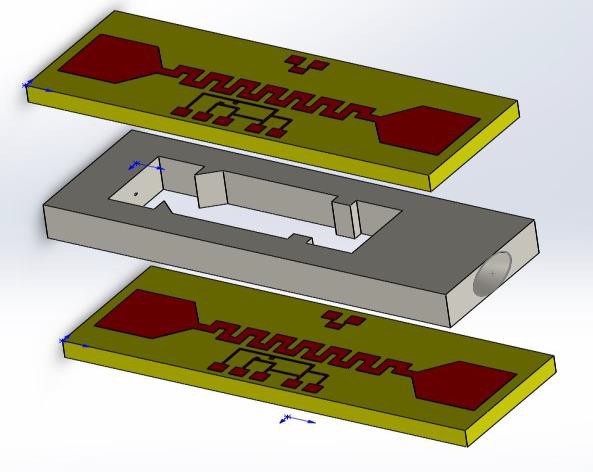
Design and Development of MEMS based Absolute, Differential and Gauge Pressure Transducers.
Other Projects
Get Access
Design Services (pdf) - Mechanical Design and Modelling & 3D Printing for Prototypes:-
Solid works software is used to create both 2D and 3D drawings and validated based on the requirements.
3D Printing of the modelled housing is used to integrate the assembled hardware and finally a prototype unit is delivered. - Prototype Electronics Assembly and Testing :-
PASF sources components, PCB’S for prototypes too and assembles PCB’S before testing.
CeNSE/IISc, External Users can avail the Design services facility of PASF and for more information please visit the below to get access to PASF design services with a presentation of more details in pdf format as below.
Schematics Development for Analog, Power and Digital Circuits with component count from as low as 50 to 3000.

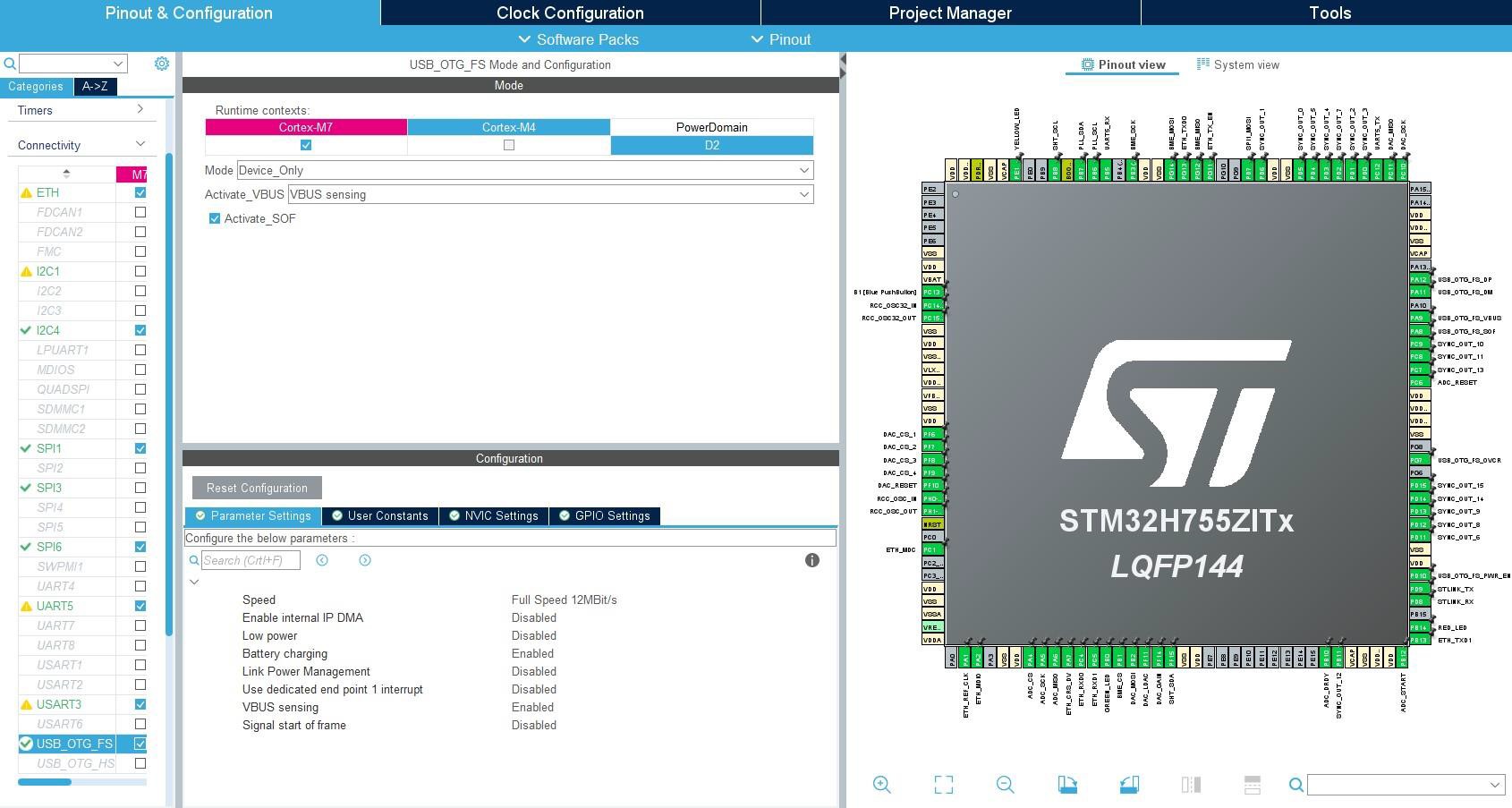
Embedded platform development involves creating software and firmware for embedded systems, specialized computer systems designed to perform specific functions, typically within larger systems. This development is distinguished by its use of specialized tools, such as integrated development environments (IDEs) and debuggers designed explicitly for hardware platforms like ARM Cortex and AVR. These tools are crucial as they help write, test, and optimize code that is highly dependent on hardware specifics. The complexity in embedded platform development often arises from the need to interface directly with hardware at a low-level driver. PASF can manage various hardware interfaces, such as serial ports, PWM, SPI, I2C buses, ADCs, and DAC, which require precise control and timing. Moreover, the code itself is complex, typically involving tight resource constraints and the need to optimize for performance and power efficiency. It must also handle asynchronous events and maintain robust operation under various system states, often leading to complex state machine designs and concurrency management with potential issues such as race conditions and deadlocks.
Absolute Pressure Transducer (1.2 bar A)
The unit consists of a suitable transducer and signal conditioning electronics. This converts a pressure input into a proportional DC voltage output. The unit is energized by 28 Vdc (16-32 Vdc) supply. The sensor output is 0.25V – 5 Vdc corresponding to 0 – 1200 mbar Absolute input pressure range. It’s function is to sense the air pressure inside the cabin of an aircraft.
Transducer specification is as below:
- Temperature range: -55 °C to +80 °C
- Acceleration : -3.5 to 10 g
- Altitude : Up to 18 km above sea level
- Characteristics : Linearly varying output from 0.25 Vdc (at 0 mbar A) to 5Vdc (at 1200 mbar A)
- Sensor Supply : 28 Vdc (16-32 Vdc)
- Sensor Range : 0 to 1200mbar (Absolute)
- Sensor accuracy : ±1% of FSR ( 0 °C to +50 °C), ±1.5% of FSR( -25°C to 0 °C and +50°C to +80 °C)
- Proof Pressure : 2 bar (Absolute)
- Operating Temperature : -25 °C to +80 °C
- Max. Temperature : -55 °C to +80 °C
- Electrical : MIL-C-38999 class Y series III along with the mating connector and backshell.
- Weight : 150 grams.
A/1
Absolute Pressure Transducer (Altitude Sensor)
Absolute pressure transducer is connected to Pitot-static system of the helicopter for sensing the pressure at static port and converts this pressure into electrical signal. This signal of transducer shall be used by the recorder for continuous recording of the altitude data of the helicopter with reference to sea level (1013.25mbar).
Transducer specification is as below:
- Pressure range: 0 to 1 bar, absolute
- Altitude range: Sea level (0 ft) to 25000ft
- Input Power supply: 28±4 VDC for excitation
- Output: 0 (at 0 bar) to 5V DC (at 1bar)
- Accuracy: ±1 %
- Current Consumption: < 50mA
- Output Impedance: ≤ 50Ω
- Proof Pressure: 2 times rated pressure range (2bar)
- Burst Pressure: 3 times rated pressure range (3bar)
- Insulation Resistance: ≥100 MΩ at 50VDC
- Weight: ≤ 160gms
- Operating Temperature : – 40°C to +65°C
- Construction materials : Stainless Steel (Anti Corrosive)
- Electrical Receptacle : MIL-C-26482 series-1/ D38999 series III or equivalent MIL qualified connector.
A/2
Gauge Pressure Transducer (10 bar G)
The unit consists of a suitable transducer and signal conditioning electronics. This converts a pressure input into a proportional DC voltage output. The unit is energized by 28 Vdc (16-32 Vdc) supply. The sensor output is 0.25V – 5 Vdc corresponding to 0.4 – 10bar input pressure range. It’s function is to sense the pressure of the air media of ECS and provide a proportional electrical signal.
Transducer specification is as below:
- Temperature range: -55 °C to +80 °C
- Acceleration : -3.5 to 10 g
- Altitude : Up to 18 km above sea level
- Characteristics : Linearly varying output from 0.25V (at 0.4 bar G) to 5.0 Vdc (at 10 bar G)
- Sensor Supply : 28 Vdc (16-32 Vdc)
- Sensor Range : 0 to 10 bar (gauge)
- Sensor accuracy : ±2.5% of FSR
- Proof Pressure :20 bar (gauge)
- Operating Temperature : -40 °C to +80 ºC
- Max. Temperature : +80ºC
- Electrical : MIL-C-38999 class Y series III along with the mating connector and backshell.
- Weight : < 150 grams.
G/1
Gauge Pressure Transducer (600 mbar G)
The unit consists of a suitable transducer and signal conditioning electronics. This converts a pressure input into a proportional DC voltage output. The unit is energized by 28 Vdc (16-32 Vdc) supply. The sensor output is 0.25V – 5.25 Vdc corresponding to 0 – 600 mbar G input pressure range. It’s function is to sense the pressure of the air media at Avionics Inlet and provide a proportional electrical signal.
Transducer specification is as below:
- Temperature range: -55 °C to +80 °C
- Acceleration : -3.5 to 10 g
- Altitude : Up to 18 km above sea level
- Characteristics : Linearly varying output from 0.25V (at 0 mbar G) to 5.25 Vdc (at 600 mbar G)
- Sensor Supply : 28 Vdc (16-32 Vdc)
- Sensor Range : 0 to 600 mbar (gauge)
- Sensor accuracy : ±1% of FSR
- Proof Pressure :1.2 bar(gauge)
- Operating Temperature : -40 °C to +50 °C
- Max. Temperature : +80ºC
- Electrical : MIL-C-38999 class Y series III along with the mating connector and backshell.
- Weight : < 150 grams.
G/2
Gauge Pressure Transducer (0-200bar)
It’s Application is mainly to find the measurement of pressure inside backup Oxygen cylinder (BOS).
Transducer specification is as below:
- Pressure Range: 0-200Bar (Gauge)
- Proof Pressure: 300 Bar
- Full Scale Output: 2.0 V ± 0.1V
- Zero Pressure Output: 0 V ± 0.1V
- Insulation resistance: >100MΩ @50VDC
- Case Material: AISI 304L/APX-4 Stainless Steel
- Compensated Temperature Range: -40°C to + 80° C
- Non linearity + hysteresis: < 0.5 % F.S.O.
- Electrical Interface:
- 4 Core, Colour coded Twisted, Shielded Teflon wires- 1.5m length.
- Colour Code:
- Red : (+ve) Input Supply 28V dC Yellow: (- ve) Input Supply
- Green:(+ve) Output
- White:(-ve) Output
- Input Supply / Excitation: 16-32 V dC (Normal 28V DC)
- Max. Input Current : < 10mA
- Mechanical Interface: M14x1.5 Male thread
- Weight: < 85 Grams with electronics and with Cable.
G/3
0-400Bar MEMS Pressure Transducer (Gauge)
It’s Application is mainly to find the measurement of Pressure inside Backup Oxygen Cylinder (BOS).
Transducer specification is as below:
- Pressure Range: 0-400Bar (Gauge calibrated)
- Proof Pressure: >800 Bar
- Full Scale Output: 4.5 V ± 0.1V
- Zero Pressure Output: 0.5V ± 0.1V
- Insulation resistance: >100MΩ @50VDC
- Case Material: AISI 304L/APX-4 Stainless Steel
- Compensated Temperature Range: -40◦ C to + 80◦ C
- Non linearity + hysteresis: < 0.5 % F.S.O.
- Electrical Interface:
- 4 Core, Colour coded Twisted, Shielded Teflon wires- 1.5m length.
- Colour Code:
- Red : (+ve) Input Supply 28 Vdc
- Yellow: (- ve) Input Supply
- Green:(+ve) Output
- White:(-ve) Output
- Input Supply / Excitation: 16-32 VdC (Normal 28 Vdc)
- Max. Input Current : < 10mA
- Mechanical Interface: M14x1.5 Male thread
- Weight: < 85 Grams with electronics and with Cable.
G/4
Differential Pressure Transducer (600 mbar D)
The unit consists of a suitable transducer and signal conditioning electronics. This converts a pressure input into a proportional DC voltage output. The unit is energized by 28 Vdc (16-32 Vdc) supply. The sensor output is 0.25V – 5.25 Vdc corresponding to 0 – 600 mbar D differential input pressure range. It’s function is to sense the Differential pressure across the condenser and provide a proportional electrical signal.
Transducer specification is as below:
- Temperature range: -55 °C to +80 °C
- Acceleration : -3.5 to 10 g
- Altitude : Up to 18 km above sea level
- Characteristics : Linearly varying output from 0.25V (at 0 mbar D) to 5.25 Vdc(at 600 mbar D)
- Sensor Supply : 28 Vdc (16-32 Vdc)
- Sensor Range : 0 to 600 mbar (differential)
- Sensor accuracy :±1% of FSR
- Proof Pressure :1.2 bar(differential)
- Max. pressure at HP : 1.6 bar(Absolute)
- Operating Temperature : -40 °C to +50 °C
- Max. Temperature : 60ºC
- Electrical : MIL-C-38999 class Y series III along with the mating connector and backshell.
- Weight : < 150 grams.
D/1
Differential Pressure Transducer (150 mbar D)
The unit consists of a suitable transducer and signal conditioning electronics. This converts a pressure input into a proportional DC voltage output. The unit is energized by 28 Vdc (16-32 Vdc) supply. The sensor output is 0.25V – 5.25 Vdc corresponding to 0 – 150 mbar differential input pressure range. It’s function is to sense the Differential pressure across the condenser and provide a proportional electrical signal.
Transducer specification is as below:
- Temperature range: -55 °C to +80 °C
- Acceleration : -3.5 to 10 g
- Altitude : Up to 18 km above sea level
- Characteristics : Linearly varying output from 0.25V (at 0 mbar D) to 5.25 Vdc (at 150 mbar D)
- Sensor Supply : 28 Vdc (16-32 Vdc)
- Sensor Range : 0 to 150 mbar (differential)
- Sensor accuracy :±1% of FSR
- Proof Pressure :0.3 bar(differential)
- Max. pressure at HP : 1.6 bar(Absolute)
- Operating Temperature : -40 °C to +50 °C
- Max. Temperature : +60ºC
- Electrical : MIL-C-38999 class Y series III along with the mating connector and backshell.
- Weight : < 150 grams.
D/2
Differential Pressure Transducer (Air Speed Pressure sensor)
Differential pressure transducer is connected to Pitot-Static system of the helicopter for sensing the pressure at the pitot and static port of the helicopter and converts this pressure into electrical signal. This signal of transducer shall be used by the recorder for continuous recording of the airspeed data of the helicopter.
Transducer specification is as below:
- Pressure range: 0 to 140mbar Differential
- Altitude range: Sea level (0 ft) to 25000ft
- Input Power supply: 28±4 VDC for excitation
- Output: 0 (at 0 bar) to 5V DC (at 140mbar)
- Accuracy: ±1 %
- Current Consumption : < 50mA
- Output Impedance: ≤ 50Ω
- Proof Pressure: 2 times rated pressure range (2bar)
- Burst Pressure: 3 times rated pressure range (3bar)
- Insulation Resistance: ≥100 MΩ at 50 VDC
- Weight: ≤ 175gms
- Operating Temperature : – 40 °C to +65 °C
- Construction materials: Stainless Steel (Anti Corrosive)
- Electrical Receptacle : MIL-C-26482 series-1/ D38999 series III or equivalent MIL qualified connector.
D/3
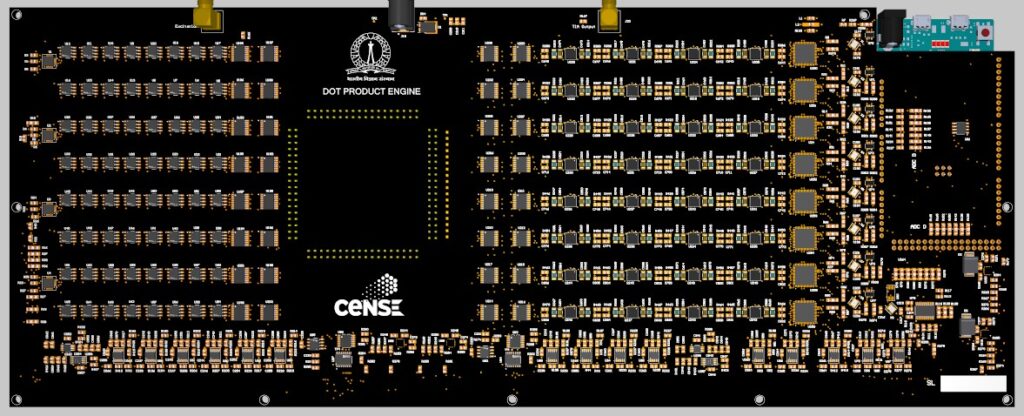
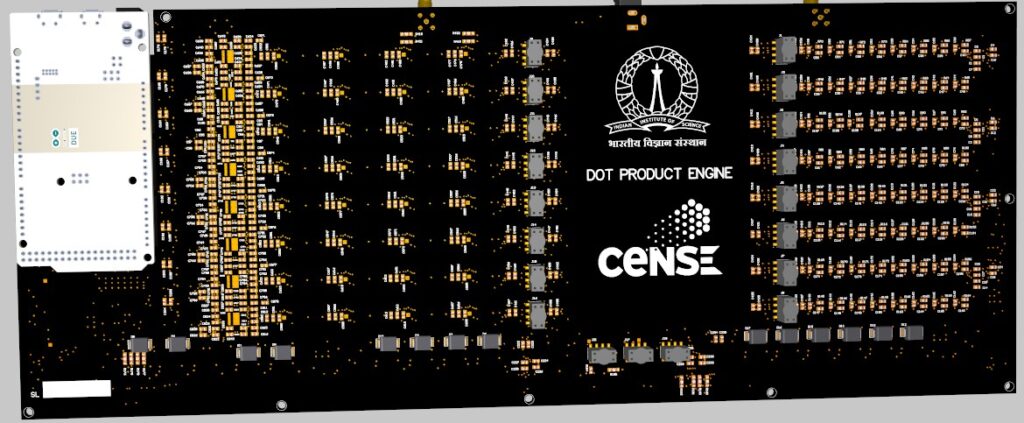
Simple 2 Layer Board to Complex PCB Assemblies as below:- Board Size 415mmx165mm- 4 Layer Board with 216 ICS and 3680 Passives.
Other Projects
Life Cycling System

The system mainly developed for study the reliability and ageing effect of the pressure transducers which will going to use on aerospace applications. The Pressure cycle test set up comprises of two solenoid valves – one for pressurizing and the other for depressurizing, an electronic square wave oscillator with transistor relay drive circuit for controlling the “ON” and “OFF” timings of the solenoid valves, power supply for exciting the electronics and solenoid valve, and pneumatic interconnecting adaptors.
During the test, for recording the output data of the pressure transducer, data acquisition system is also incorporated in the set up.

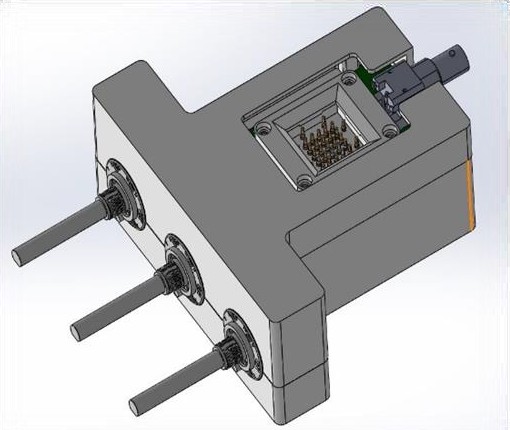
Peristatic pump for drug delivery system
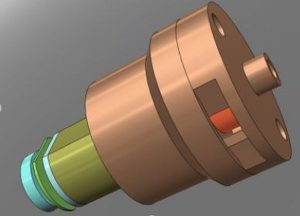
Micropump technology has emerged as a critical research area for the biological analysis, electronic component liquid cooling, medicine, space exploration, thermal management, etc. The pumping mechanism of the micropump will depend on their targeted applications. Mainly, three types of actuating mechanism based micropumps have been reported: (I) mechanical displacement, (II) electro-kinetic, and (III) magneto-kinetic. In present study, a mechanical displacement principle has been adopted. Peristalsis mechanism based pumps are called as peristaltic pumps. These peristaltic pumps often consist of rotating rollers to squeeze the flexible tube containing a fluid. The squeezing action of the peristaltic pump has been created by various means such as motor driven rollers, magnetic balls, Shape Memory Alloy (SMA) actuation, and Lead Zirconate Titanate (PZT). In the present study, a geared DC-motor driven roller/cam was used to squeeze the silicone tube to obtain the pumping action. The aim of this work is to design and develop a peristaltic micropump suitable for drug delivery application. In particular, development of an insulin delivery pump for diabetic people. While designing a micropump for drug delivery or insulin delivery application, one has to consider the following important aspects.
Fail-safe operation—in case of motor failure the pump should block the flow of fluid positively.
- Compactness and light weight to facilitate ease of wearing.
- Low energy consumption, as the system is battery operated and the battery should last till the entire insulin in the source cartridge is dispensed.
- Ease of programmability of flow rate and volume.
- User friendly operation, to provide ease of loading and unloading of the catheter and insulin cartridge without contaminating the drug.
- The pump should generate enough pressure to pump the drug against the blood pressure.
- Fail-safe operation—in case of motor failure the pump should block the flow of fluid positively.
Power device GaN package

POWER semiconductor device packaging is in many ways similar to that of IC packaging. It provides mechanical support to the fragile chip, electrical interconnections, heat dissipation paths, and protection from the environment. However, there are important differences between the two that are dictated by the functions of the power device. For example, the number of interconnections necessary is substantially less than that of a microprocessor. In a power MOSFET or insulated gate bipolar transistor (IGBT), a minimum of three interconnections are necessary (drain, source, and gate). Power devices usually handle much larger currents and voltages such that they require larger interconnections and more efficient thermal management. Such seemingly minor and simple differences may not be that easy to implement in real package structures because of constraints on the physical properties of the device and package component materials and the thermomechanical issues such as coefficient of thermal expansion (CTE) mismatches that can adversely affect the performance and reliability of the package or module.

IoT Module
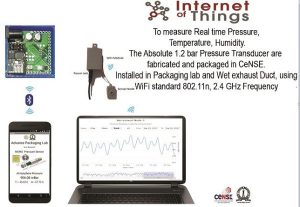
Internet of Things (IoT), which is transforming almost every industry, including retail. Devices with smart sensors are capable of collecting and exchanging observational and transactional data with each other, making them seamlessly interconnected. The data gathered from IoT can be utilized to provide insights, trigger actions and control outcomes all in real time with or without any human intervention.
There are three stage in the development process First one will be the design of the sensor node, where all the sensor required for the monitoring parameter are put together with in an embedded system having a Wi-Fi transverse. The second will the Power Management. The third will be the Designing the architecture for Server. That provides functionality for other programs or devices, called “clients”(Sensor node). This architecture is called the client–server model, and a single overall computation is distributed across multiple processes or devices.
Results of IoT Module
Microthrusters
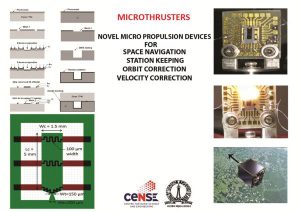
Microthrusters are an application of MEMS technology to the field of aerospace. These are propulsion systems that require no elaborate pump, valves or piping systems. The work currently is centered around developing Microthrusters that are capable of operating in a continuous mode. From solid propellant combustion to decomposition of a liquid mono-propellant, different techniques have been explored to obtain thrusts in the range of a milliNewton sans compromising on the specific impulse
Body Conduction

Design and Development of Gas Sensors and Transmitters to replace imported units
This Project is for Leak Detection of Various Gases used in the Industry. The Transmitter Monitors Gases such as O2, NO2, H2, N2H4 and Transmits 4-20ma on a 2 wire loop to indicate the Leak concentration of the Gases. The unit is Palm Sized(130LX80 WX55D mm) and has a intelligent Algorithm which compensates the RH% variation and updates the Minimum threshold of Gas Concentration.
Realtime Air Quality Monitoring System
The Realtime Airquality Monitoring System updates on a Real Time basis the Data of CO, CO2, SO2, NO2 Sensors along with Ambient RH & Temp. The purpose of this is to demonstrate the Nanosensors developed and Fabricated at CeNSE-IISc. Along with Machine Learning and Data Analytics it gives Real Trend of Pollutants in the Environment. The Cloud Hosted Data Base updates all 6 Sensors Data once in ~50secs.


| Model | Air CeNSE 2.0 |
| Detectable Gases | CO,NO2,SO2,CO2 |
| Max Detectable Gas Concentration range (xx/m3) | CO-mg/m3 | CO2-ppm | NO2(ug/m3) | SO2(ug/m3) 10 | 1000 | 100 | 100 |
| Detectable Particle size | 2.5µm – 10µm |
| Humidity Sensor Range | 40%RH to 100%RH |
| Temperature Sensor Range | 25°C to 85°C |
| Noise Max Level | 120dB |
| Pressure Sensor Range | 5psi to 16 psi |
| Supply Voltage | DC 5V |
| Storage Temperature | 25°C to 85°C |
| Battery Backup-Continuous | 4 Hr |
| Dimensions-TBD | ~110(W) | ~50(H) | ~165(L) |
| Weight-TBD | ~500gm |
The Design of AQM is based on STM32F411 Arm Cortex M3 Microcontroller and has a Microcontroller board which has a Display Interface, Battery Charging Circuit, GSM Interface, LCD display, Keypad, SD Card Interface and samples the 6 Sensors Data with ADC and Mux Configuration.
The Final unit is connected to Cloud to update all 6 Sensors Data on a Grafana Data base with 1 minute update on a real time basis.
There is a Signal Conditioning Board with Transconductance Amplifier to program the 4 sensor and heater Voltages . In addition a RH/ Temperature Sensor measures the ambient environment condition.
The Firmware is written for boot up and for sensor, heater ramp up happens and reads the sensor current. The values of Each Sensor converted units of levels are done using an appropriate Algorithm.






